Screenshot
자율주행 기술이 성숙기에 접어들면서 차량이 주변 환경을 인식하는 방식에 근본적인 변화가 일어나고 있습니다. 그동안 자율주행 시스템은 라이다와 카메라를 각각 별도의 하드웨어로 탑재한 뒤, 소프트웨어적으로 두 데이터 스트림을 융합하는 방식을 주로 사용해 왔습니다. 하지만 이 과정에서 발생하는 보정 오류와 데이터 처리의 비효율성이 기술적 병목 현상으로 지적받아 왔습니다. 최근 라이다 전문 기업인 오스터가 기존 방식의 한계를 극복할 새로운 센서를 공개하며 업계의 이목이 집중되고 있습니다.
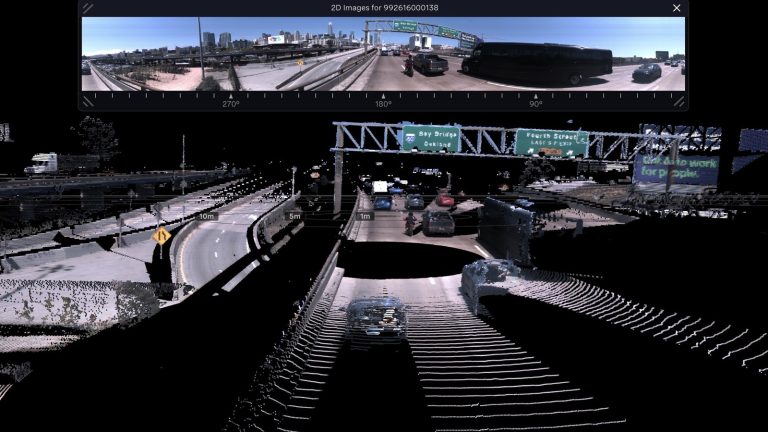
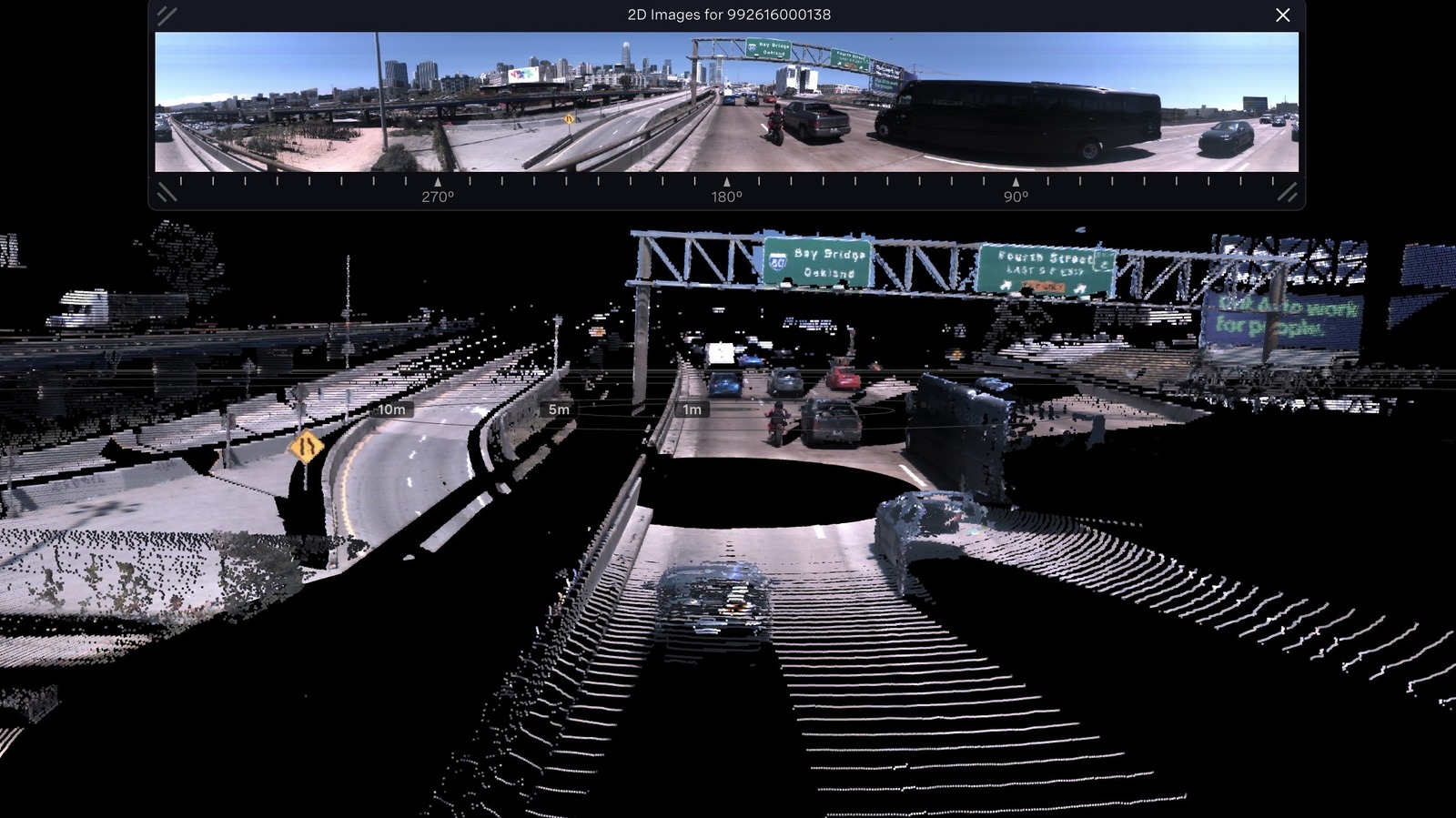
이 새로운 센서의 핵심은 라이다 거리 데이터와 카메라 이미지를 동시에 획득할 수 있는 단일 하드웨어 구조에 있습니다. 과거에는 라이다 센서와 카메라를 각각 구매하고 이를 물리적으로 정렬한 뒤, 고차원적인 추론을 통해 두 데이터를 매칭하는 데 막대한 시간을 소모했습니다. 특히 두 센서의 보정 과정에서 발생하는 오차는 자율주행의 정확도를 떨어뜨리는 주요 원인이었습니다. 오스터의 새로운 기술은 이러한 복잡한 과정을 생략하고, 하나의 장치에서 네이티브 컬러 라이다를 통해 360 도 영상과 거리 정보를 동시에 생성해냅니다.
이 기술이 주목받는 이유는 단순한 소형화를 넘어 데이터의 신뢰성과 처리 속도를 동시에 잡았기 때문입니다. 오스터의 CEO 는 인간 역사상 라이다와 카메라를 별개로 구매해 조합해 온 방식이 비효율적이었다고 지적하며, 이제는 하나의 센서로 모든 것을 해결할 수 있는 시대가 왔다고 강조했습니다. 특히 자동차용 모델인 OS1 Max 는 200 미터까지의 감지 거리를 확보하면서도 고해상도 영상을 제공하여, 기존에 두 개의 시스템을 따로 설치해야 했던 공간과 전력 소모를 획기적으로 줄여줍니다.
이러한 하드웨어 통합 추세가 지속된다면 자율주행 차량의 설계 자유도는 크게 높아질 것입니다. 별도의 센서 배열을 위한 공간 확보가 줄어들고, 데이터 융합을 위한 복잡한 소프트웨어 로직이 간소화되면서 시스템 전체의 안정성이 향상될 것으로 예상됩니다. 향후 주요 자동차 제조사들이 이 통합 센서 기술을 어떻게 도입할지, 그리고 이로 인해 자율주행 레벨 4 이상 상용화의 속도가 어떻게 달라질지가 관전 포인트가 될 것입니다. 센서 기술의 단순화가 곧 자율주행의 대중화를 앞당기는 열쇠가 될 수 있기 때문입니다.